

Research Overview
Explore my research work! These projects would not be possible without exceptional supervision!
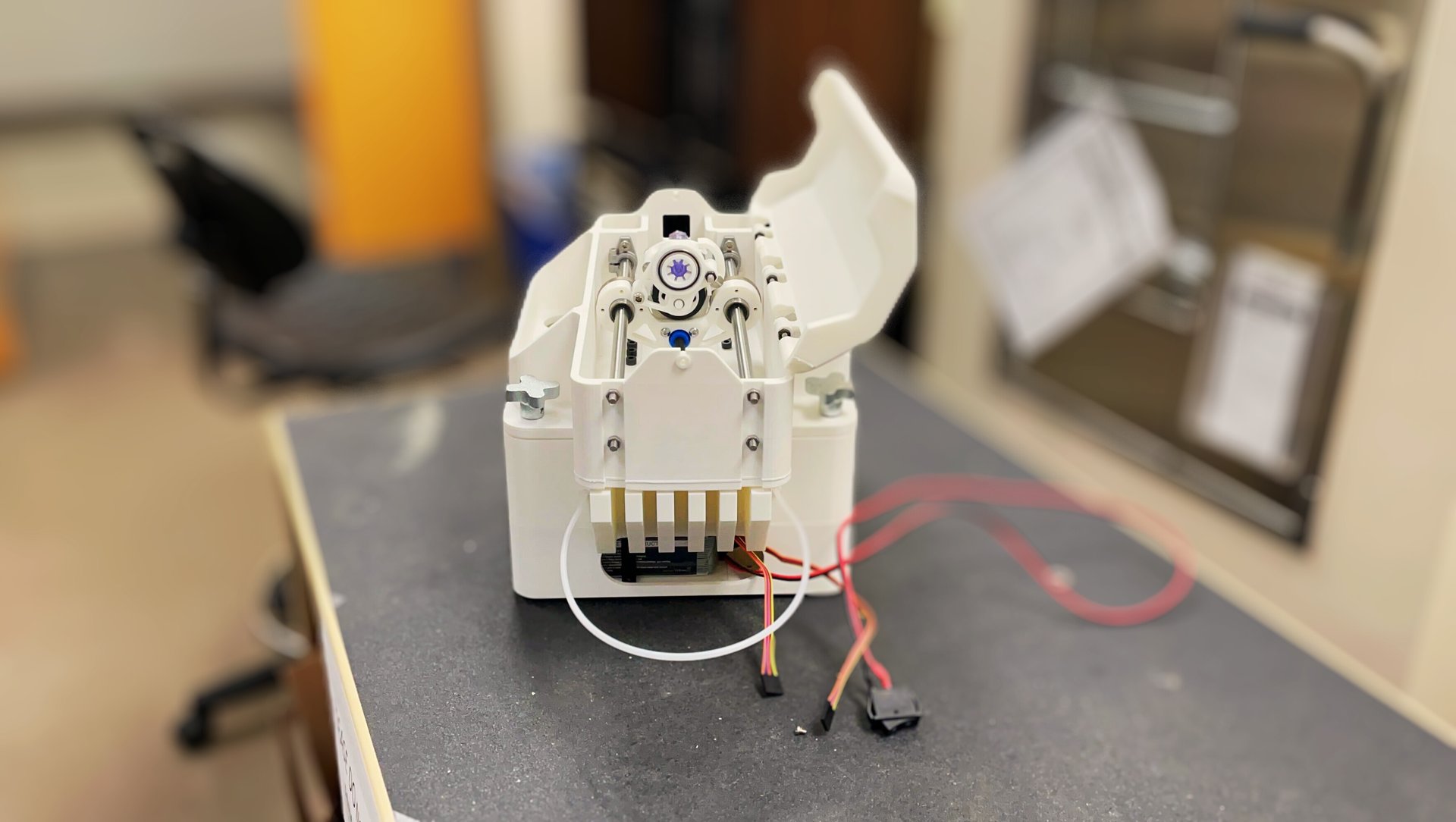
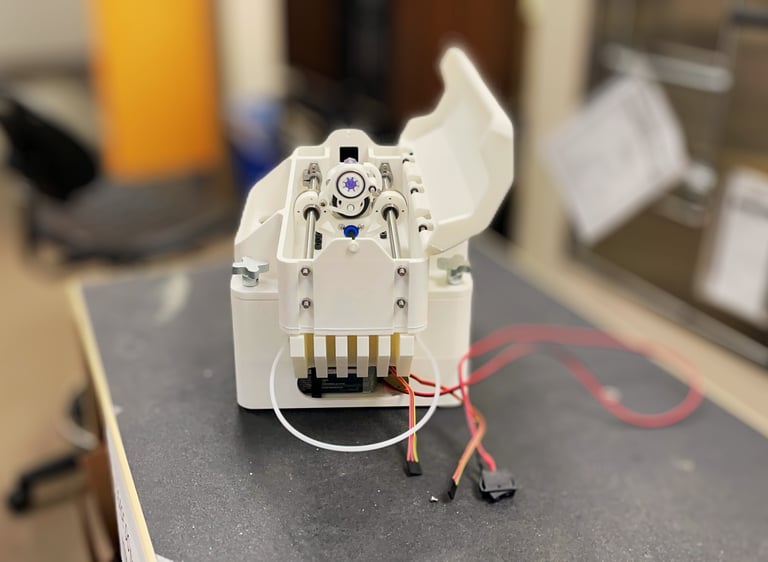
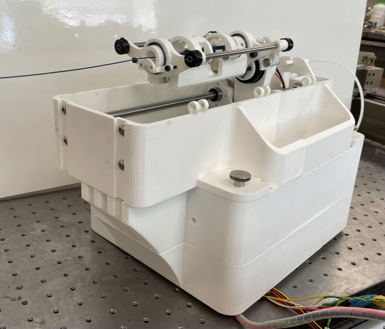
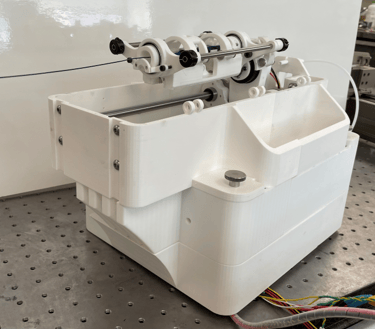
Design and development of a 6-DoF versatile catheter robot. More robots are coming soon!!
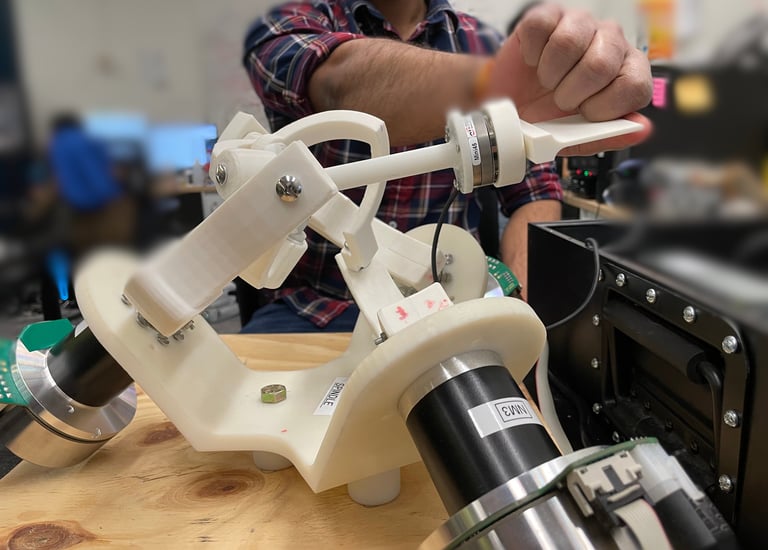

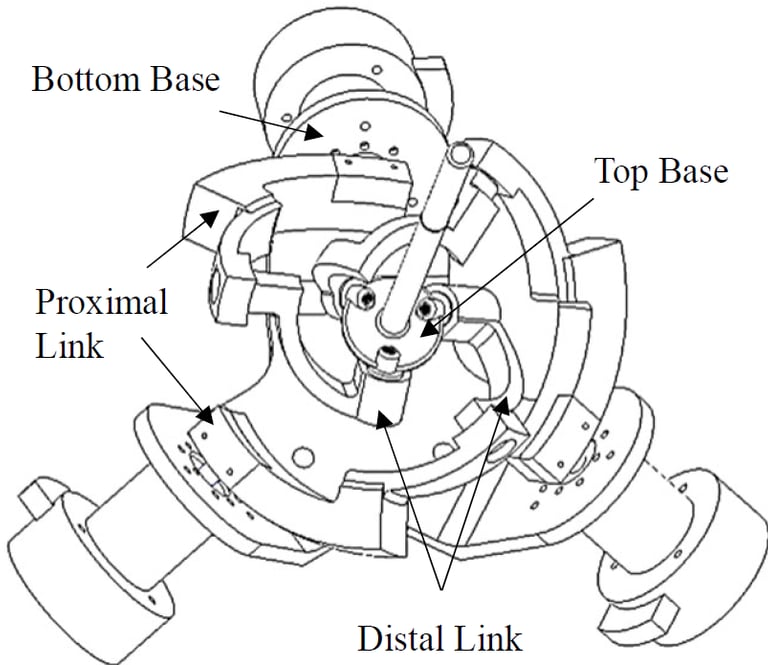
Enhancing the efficacy of upper-limb rehabilitation through robotics (SPINDLE - haptic parallel manipulator).
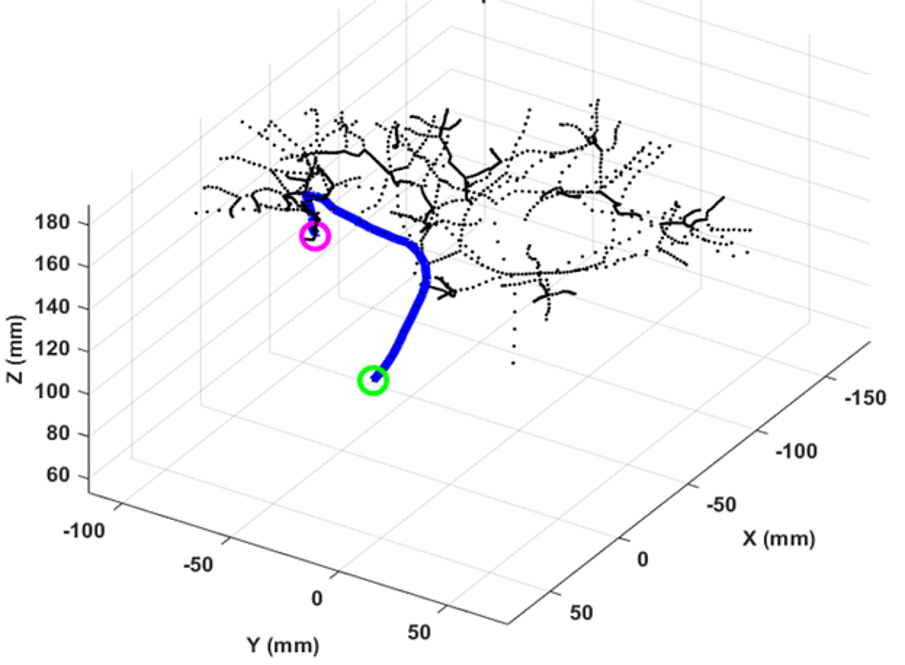


Development of path optimization and real-time motion control algorithms for automating endovascular interventions.
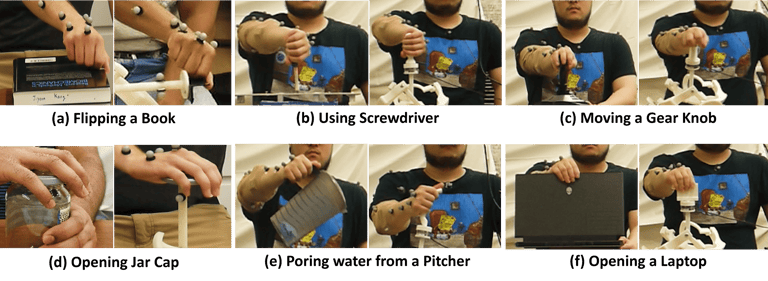
Investigating subject biomechanics to enhance the efficacy of training activities of daily living.
North Carolina State University
2022 - Present
Doctor of Philosophy - Mechanical Engineering
Education
University at Buffalo
Master of Science - Robotics
2020 - 2022
Professional Experience
Research Assistant
Department of Mechanical and Aerospace Engineering | North Carolina State University
2022 - Present
Current Advisor: Dr. Gregory Buckner
Dissertation: Design, Development, and Experimental Validation of a Catheter Robot with Motion Planning for Selective Internal Radiation Therapy.
Mechanical Engineering Senior Design:
Assisted Dr. Chau Tran as a Teaching Assistant/Instructor with Industry Sponsored Project - (Corning Inc.) 415: Mechanical Engineering Design I and 416: Mechanical Engineering Design II).
Department of Mechanical and Aerospace Engineering | North Carolina State University
Teaching Assistant/Instructor
2024 - 2025
Bachelor of Technology - Mechanical Engineering
BML Munjal University
2016 - 2020
2020- 2022
Research Assistant/Associate
Supervisor: Dr. Jiyeon Kang
Master's Thesis: Emulation of Activities of Daily Living Tasks with a Haptic Robotic Device to Promote Rehabilitation of Stroke Survivors.
Department of Mechanical and Aerospace Engineering | University at Buffalo
Controls Lab:
Assisting Dr. Nicholas G and Dr. Joe Manning as a Teaching Assistant/Instructor for MAE 405 Controls Lab.
2025 - Present
Fluid and Thermal Sciences Laboratory:
Assisted Dr. Srinath Ekkad as co-laboratory director in training new teaching assistants with mechatronics equipment and data acquisition devices, along with teaching undergraduate students.
2022 - 2023
Course Developer and Teaching Assistant - Experience Learning
2020- 2022
Department of Engineering Education | University at Buffalo
Supervisor: Dr. Andrew Olewnik
Assisted in developing two courses (ENS 321 and ENS 322): different structured mechatronics experiments using microcontrollers to teach cross-domain theoretical concepts and industrial system validation procedures.
Assisted in teaching mechatronics design labs to undergraduate students using affordable microcontrollers and sensors.
2019
Robotics Research Trainee
CSIR-Central Scientific Instruments Organization | India
Supervisor: Dr. Ranjan Jha
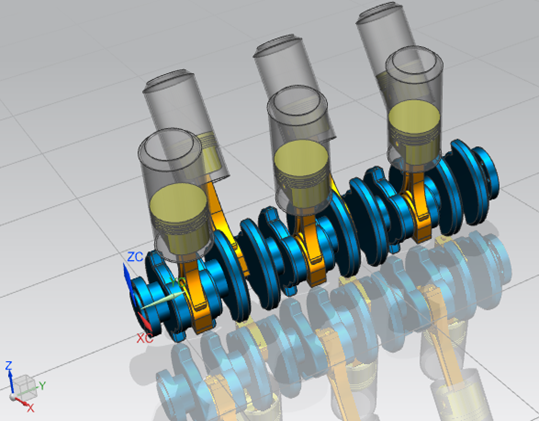
Design and Development of a 3-DoF Parallel Manipulator for Ankle Rehabilitation.
Design and Development of a Cardiovascular Catheter Insertion Mechanism.
2022 - Present
Dissertation: Design, Development, and Experimental Validation of a Catheter Robot with Motion Planning for Selective Internal Radiation Therapy.
Thesis: Emulation of Activities of Daily Living Tasks with a Haptic Robotic Device to Promote Rehabilitation of Stroke Survivors.
Major Project (CSIR, India): Development and Computational Analysis of a Three-Degree-of-Freedom Parallel Robot for Ankle Rehabilitation.
Minor Project: Optimization Studies for Fabrication of Micro Holes in Aircraft Wings.
Research Contributions
As a robotics researcher, my life's mission is to pursue my passion for designing and developing versatile medical technologies, rehabilitation robotics, human-robot interaction, and biomechanics, advancing these essential fields.
Solving medical problems with creative, innovative and translational robotic methods!
Graduate Research Assistant @ AI-based Wearable Robotics Lab
2020 - 2022
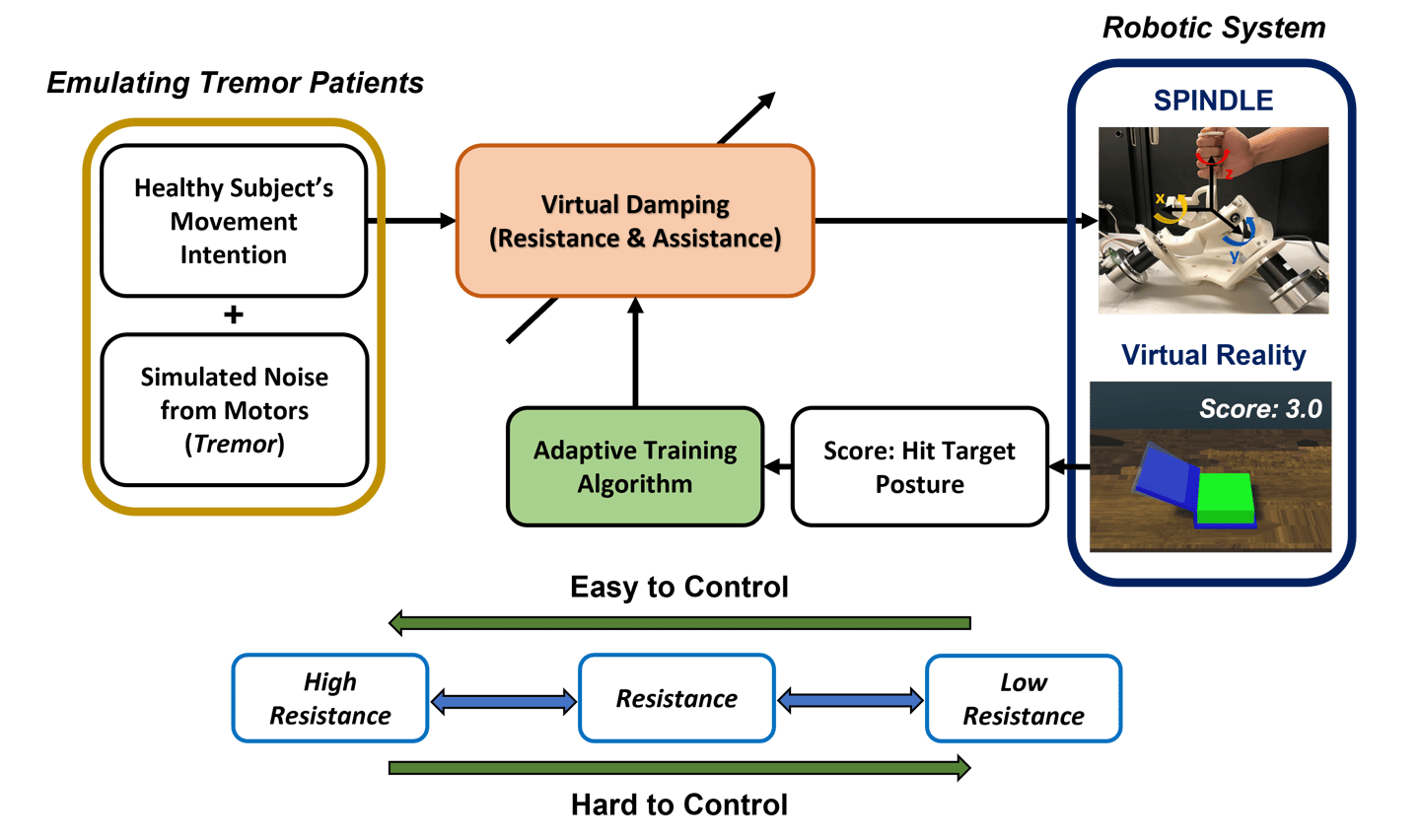
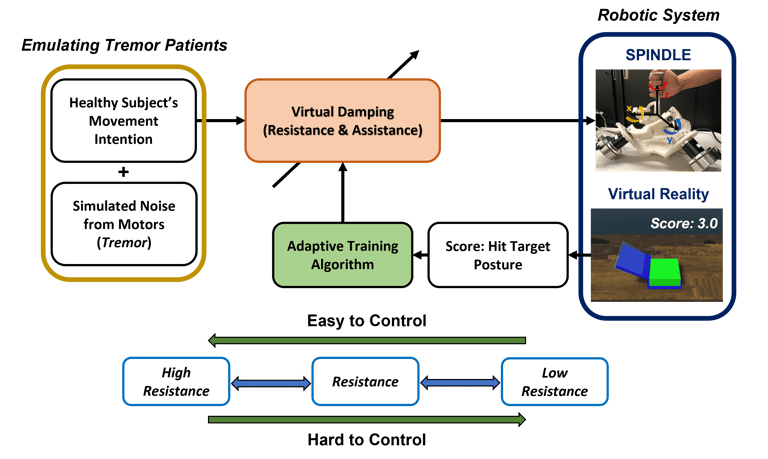
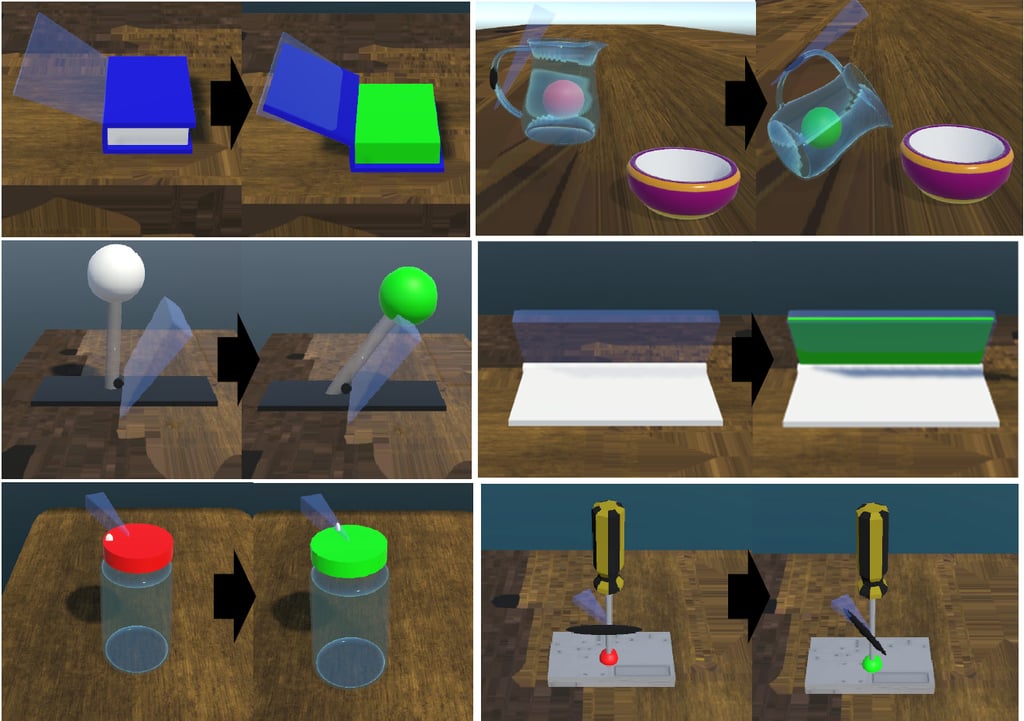
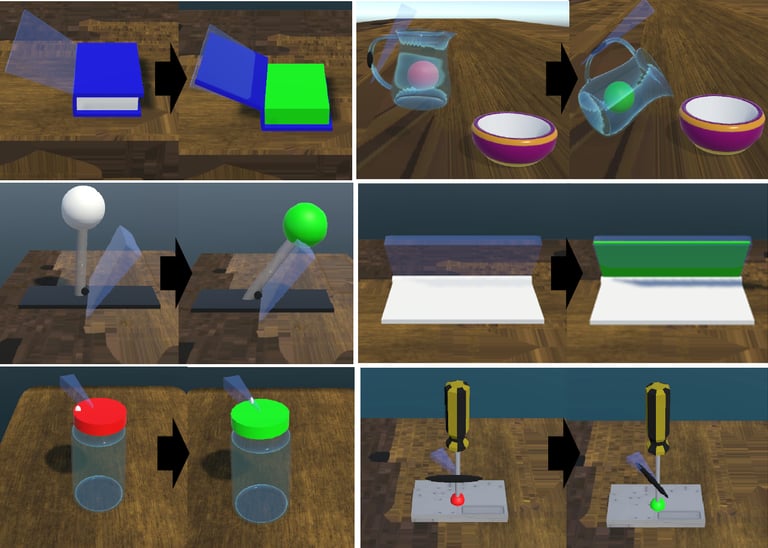
Developed a haptic-enabled SPINDLE with VR for upper limb rehabilitation using game theory.
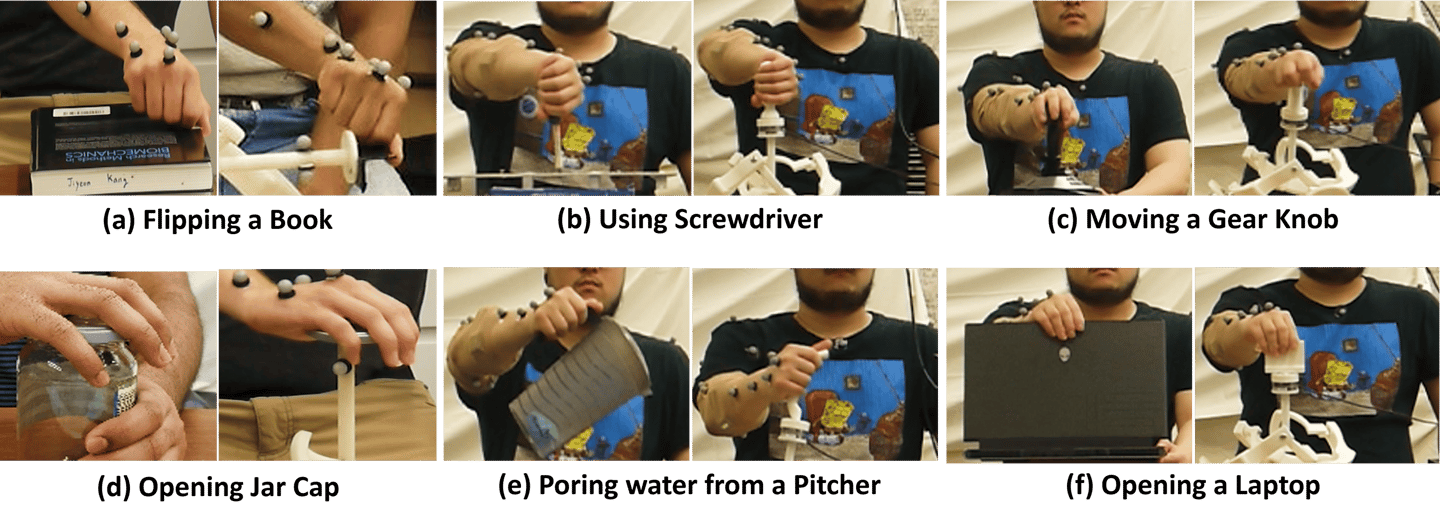
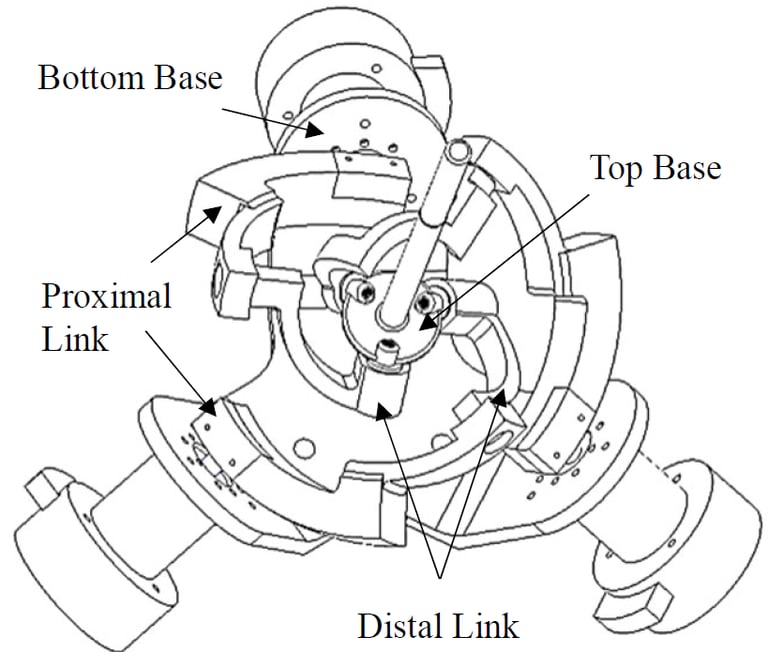
SPINDLE is a 3-DOF parallel manipulator that enables patients to practice object manipulation tasks by adaptively assisting and resisting the user's upper limb movements.
Derived the manipulator's forward and inverse kinematics to establish task-space control. Implemented kinematics and servo position control for the manipulator in LabVIEW.
Incorporated an adaptive feedforward controller for smoother end-effector motion.
Graduate Research Assistant @ North Carolina State University
2022 - Present
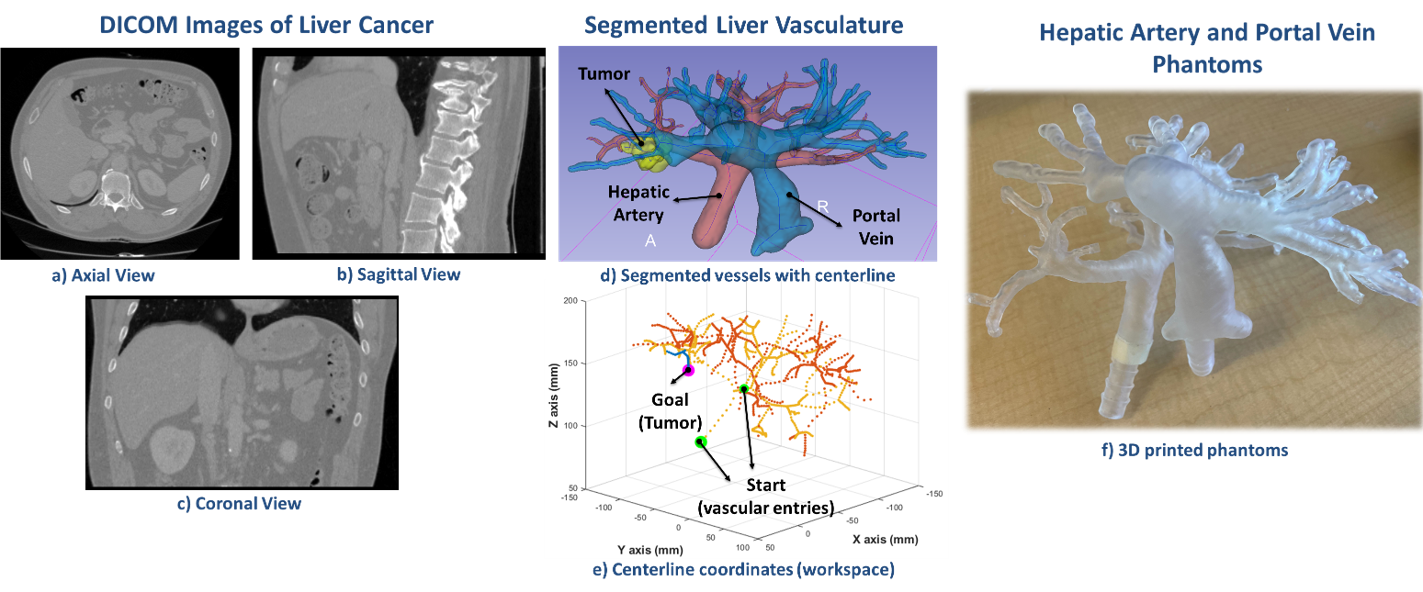
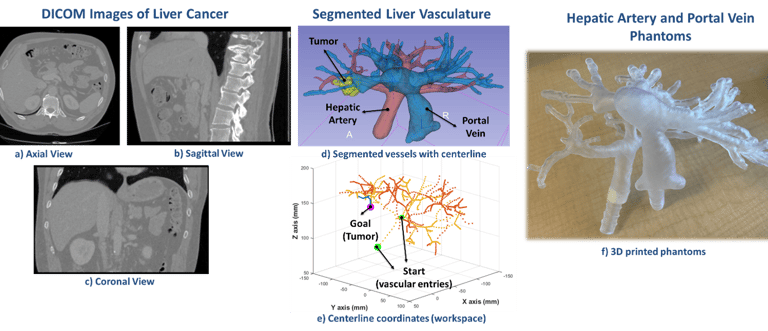
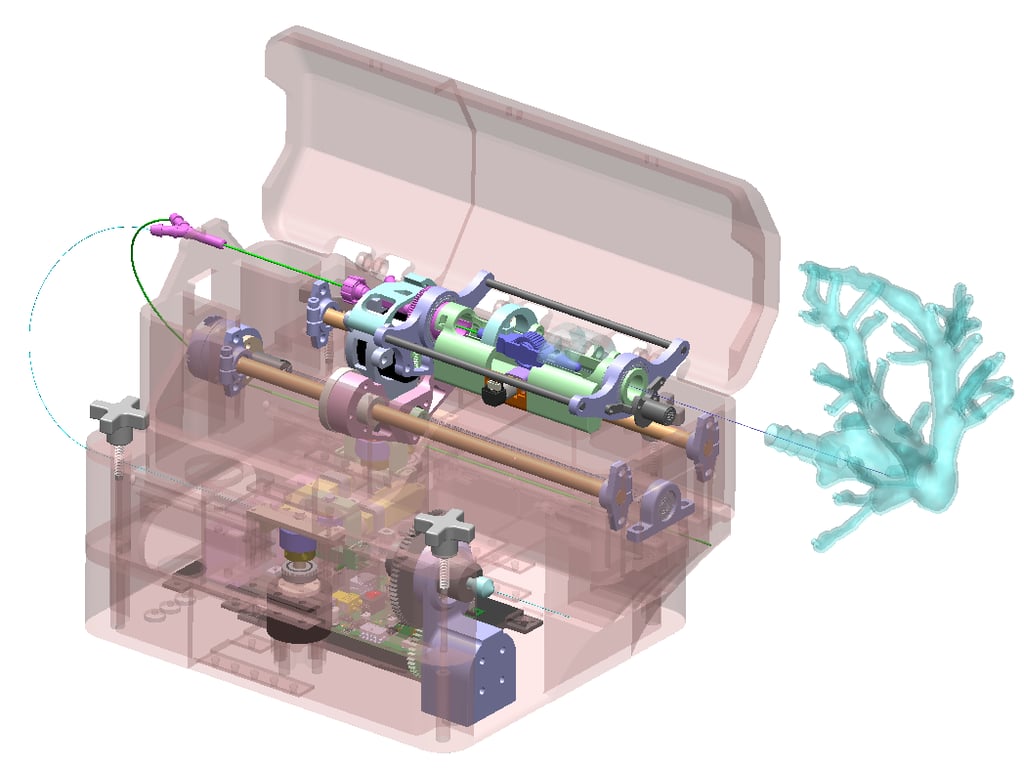
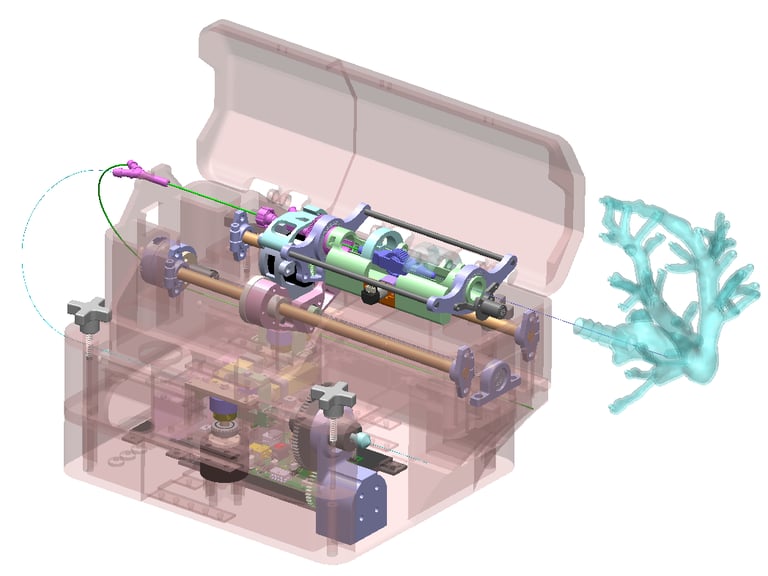
I have designed and developed a versatile and portable 6-DoF catheter robot for image-guided endovascular interventions.
A single robot enables multiple endovascular procedures: versatile mechanisms accommodate an array of off-the-shelf instruments (guidewires, micro and guide catheters) with varying diameters (⌀ 0.33-2.97 mm) and lengths.
This affordable robot architecture is designed to accommodate off-the-shelf Y-connectors and a medical torquer for angiography and precise instrument rotation.
The CAN bus communication protocol is used to simultaneously control the 5 motors (coupled with actuation modules).
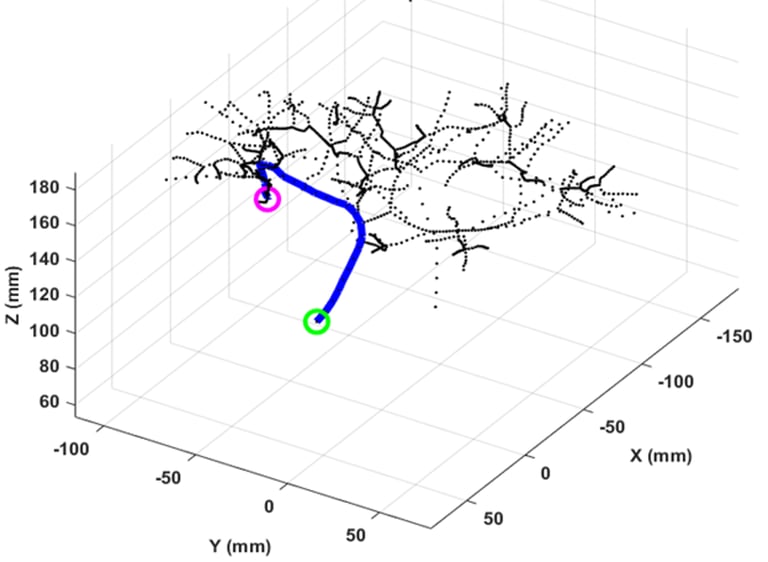
Developed a framework to stream the vascular centeline waypoints from 3D Slicer to coding platforms, facilitating the development of path-planning algorithms and optimal path identification.
Development of a real-time motion controller incorporated with a feedforward model for accurate instrument position in the vascular phantoms.
I have also led and contributed to writing literature reviews, merits, and aims for academic grants that involve a novel, versatile, and portable catheter robot.
Publications:
Kantu, N.T., Osswald, R., Kandel, A. and Kang, J., 2024. Resist-as-Needed ADL Training With SPINDLE for Patients With Tremor. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 32, pp.1735-1748.
He, P., Kantu, N.T., Xu, B., Swami, C.P., Saleem, G.T. and Kang, J., 2021. A novel 3-RRR spherical parallel instrument for daily living emulation (SPINDLE) for functional rehabilitation of patients with stroke. International Journal of Advanced Robotic Systems, 18(3), p.17298814211012325.
Publications:
Kantu, Nikhil Tej, et al. "Portable and Versatile Catheter Robot for Image-Guided Cardiovascular Interventions." IEEE/ASME Transactions on Mechatronics (2025).
N. Kantu, S. Jernigan, G. Buckner, “Autonomous Robotic Catheterization for Selective Internal Radiation Therapy (SIRT)”, NCSU MAE Graduate Research Symposium 2025, Raleigh, USA.
Kantu, Nikhil Tej, et al. “Portable and Versatile Catheter Robot for Image-Guided Endovascular Interventions”, Duke Medical Robotics Symposium 2024, Durham, USA.
Kantu, Nikhil Tej, et al. Modular and Portable Robot for Image-Guided Endovascular Interventions. , International Symposium on Medical Robotics 2023, Georgia, USA. Abstract
Research Gallery!


Let's connect!!
nkantu@ncsu.edu
Robotics Researcher
Nikhil Tej Kantu
Department of Mechanical and Aerospace Engineering
North Carolina State University